Introduced by IBM in 1956, hard disk drives have fallen in cost and physical size over the years while dramatically increasing in capacity. Hard disk drives have been the dominant device for
secondary storage of data in
general purpose computers since the early 1960s.
[3] They have maintained this position because advances in their areal recording density have kept pace with the requirements for secondary storage.
[3] Today's HDDs operate on high-speed serial interfaces; i.e.,
serial ATA (SATA) or
serial attached SCSI (SAS).
[edit] History
Hard disk drives were introduced in 1956 as data storage for an IBM
accounting computer
[4] and were developed for use with general purpose
mainframe and
mini computers.
Driven by areal density doubling every two to four years since their invention, HDDs have changed in many ways, a few highlights include:
- Capacity per HDD increasing from 3.75 megabytes to greater than 1 terabyte, a greater than 270-thousand-to-1 improvement.
- Size of HDD decreasing from 87.9 cubic feet (a double wide refrigerator) to 0.002 cubic feet (2½-inch form factor, a pack of cards), a greater than 44-thousand-to-1 improvement.
- Price decreasing from about $15,000 per megabyte to less than $0.0001 per megabyte ($100/1 terabyte), a greater than 150-million-to-1 improvement.[5]
- Average access time decreasing from greater than 0.1 second to a few thousandths of a second, a greater than 40-to-1 improvement.
- Market application expanding from general purpose computers to most computing applications including consumer applications.
[edit] Technology
[edit] Magnetic recording
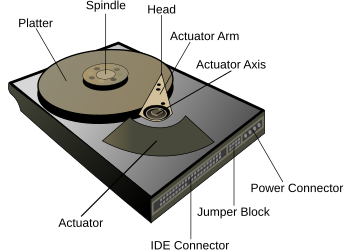
Diagram of a computer hard disk drive
A typical HDD design consists of a
spindle that holds flat circular disks called
platters, onto which the data are recorded. The platters are made from a non-magnetic material, usually aluminum alloy or glass, and are coated with a shallow layer of magnetic material typically 10–20
nm in depth, with an outer layer of carbon for protection. For reference, standard copy paper is 0.07–0.18 millimetre (70,000–180,000 nm).
[6] 
A cross section of the magnetic surface in action. In this case the binary data are encoded using
frequency modulation.
The platters are spun at speeds varying from 3,000
RPM in energy-efficient portable devices, to 15,000 RPM for high performance servers. Information is written to, and read from a platter as it rotates past devices called
read-and-write heads that operate very close (tens of nanometers in new drives) over the magnetic surface. The read-and-write head is used to detect and modify the magnetization of the material immediately under it. In modern drives there is one head for each magnetic platter surface on the spindle, mounted on a common arm. An actuator arm (or access arm) moves the heads on an arc (roughly radially) across the platters as they spin, allowing each head to access almost the entire surface of the platter as it spins. The arm is moved using a
voice coil actuator or in some older designs a
stepper motor.
The magnetic surface of each platter is conceptually divided into many small sub-
micrometer-sized magnetic regions referred to as
magnetic domains. In older disk designs the regions were oriented horizontally and parallel to the disk surface, but beginning about 2005, the orientation was changed to
perpendicular to allow for closer magnetic domain spacing. Due to the
polycrystalline nature of the magnetic material each of these magnetic regions is composed of a few hundred magnetic
grains. Magnetic grains are typically 10 nm in size and each form a single
magnetic domain. Each magnetic region in total forms a
magnetic dipole which generates a
magnetic field.
For reliable storage of data, the recording material needs to resist self-demagnetization, which occurs when the magnetic domains repel each other. Magnetic domains written too densely together to a weakly magnetizable material will degrade over time due to physical rotation of one or more domains to cancel out these forces. The domains rotate sideways to a halfway position that weakens the readability of the domain and relieves the magnetic stresses. Older hard disks used
iron(III) oxide as the magnetic material, but current disks use a
cobalt-based alloy.
[7]A write head magnetizes a region by generating a strong local magnetic field. Early HDDs used an
electromagnet both to magnetize the region and to then read its magnetic field by using
electromagnetic induction. Later versions of inductive heads included metal in Gap (MIG) heads and
thin film heads. As data density increased, read heads using
magnetoresistance (MR) came into use; the electrical resistance of the head changed according to the strength of the magnetism from the platter. Later development made use of
spintronics; in these heads, the magnetoresistive effect was much greater than in earlier types, and was dubbed
"giant" magnetoresistance (GMR). In today's heads, the read and write elements are separate, but in close proximity, on the head portion of an actuator arm. The read element is typically
magneto-resistive while the write element is typically thin-film inductive.
[8]The heads are kept from contacting the platter surface by the air that is extremely close to the platter; that air moves at or near the platter speed. The record and playback head are mounted on a block called a slider, and the surface next to the platter is shaped to keep it just barely out of contact. This forms a type of air bearing.
In modern drives, the small size of the magnetic regions creates the danger that their magnetic state might be lost because of thermal effects. To counter this, the platters are coated with two parallel magnetic layers, separated by a 3-atom layer of the non-magnetic element
ruthenium, and the two layers are magnetized in opposite orientation, thus reinforcing each other.
[9] Another technology used to overcome thermal effects to allow greater recording densities is
perpendicular recording, first shipped in 2005,
[10] and as of 2007 the technology was used in many HDDs.
[11][12][13][edit] Components

A hard disk drive with the disks and motor hub removed showing the copper colored stator coils surrounding a bearing at the center of the spindle motor. The orange stripe along the side of the arm is a thin printed-circuit cable. The spindle bearing is in the center. The actuator is in the upper left.
A typical hard disk drive has two electric motors; a disk motor to spin the disks and an actuator (motor) to position the read/write head assembly across the spinning disks.
The disk motor has an external rotor attached to the disks; the stator windings are fixed in place.
Opposite the actuator at the end of the head support arm is the read-write head (near center in photo); thin printed-circuit cables connect the read-write heads to amplifier electronics mounted at the pivot of the actuator. A flexible, somewhat U-shaped, ribbon cable, seen edge-on below and to the left of the actuator arm continues the connection to the controller board on the opposite side.
The head support arm is very light, but also stiff; in modern drives, acceleration at the head reaches 550
Gs.
The silver-colored structure at the upper left of the first image is the top plate of the actuator, a permanent-magnet and moving coil motor that swings the heads to the desired position (it is shown removed in the second image). The plate supports a squat
neodymium-iron-boron (NIB) high-flux
magnet. Beneath this plate is the moving coil, often referred to as the
voice coil by analogy to the coil in
loudspeakers, which is attached to the actuator hub, and beneath that is a second NIB magnet, mounted on the bottom plate of the motor (some drives only have one magnet).

A disassembled and labeled 1997 hard drive. All major components were placed on a mirror, which created the symmetrical reflections.
The voice coil itself is shaped rather like an arrowhead, and made of doubly coated copper
magnet wire. The inner layer is insulation, and the outer is thermoplastic, which bonds the coil together after it is wound on a form, making it self-supporting. The portions of the coil along the two sides of the arrowhead (which point to the actuator bearing center) interact with the
magnetic field, developing a tangential force that rotates the actuator. Current flowing radially outward along one side of the arrowhead and radially inward on the other produces the
tangential force. If the magnetic field were uniform, each side would generate opposing forces that would cancel each other out. Therefore the surface of the magnet is half N pole, half S pole, with the radial dividing line in the middle, causing the two sides of the coil to see opposite magnetic fields and produce forces that add instead of canceling. Currents along the top and bottom of the coil produce radial forces that do not rotate the head.
[edit] Error handling
Modern drives also make extensive use of
Error Correcting Codes (ECCs), particularly
Reed–Solomon error correction. These techniques store extra bits for each block of data that are determined by mathematical formulas. The extra bits allow many errors to be fixed. While these extra bits take up space on the hard drive, they allow higher recording densities to be employed, resulting in much larger storage capacity for user data.
[14] In 2009, in the newest drives,
low-density parity-check codes (LDPC) are supplanting Reed-Solomon. LDPC codes enable performance close to the
Shannon Limit and thus allow for the highest storage density available.
[15]Typical hard drives attempt to "remap" the data in a physical sector that is going bad to a spare physical sector—hopefully while the errors in that bad sector are still few enough that the ECC can recover the data without loss. The
S.M.A.R.T. system counts the total number of errors in the entire hard drive fixed by ECC, and the total number of remappings, in an attempt to predict hard drive failure.
[edit] Future development
[edit] Capacity
[edit] Capacity measurements
Advertised capacity
by manufacturer
(using decimal multiples) | Expected capacity
by consumers in class action
(using binary multiples) | Reported capacity |
Windows
(using binary
multiples) | Mac OS X 10.6+
(using decimal
multiples) |
| With prefix | Bytes | Bytes | Diff. |
| 100 MB | 100,000,000 | 104,857,600 | 4.86% | 95.4 MB | 100.0 MB |
| 100 GB | 100,000,000,000 | 107,374,182,400 | 7.37% | 93.1 GB, 95,367 MB | 100.00 GB |
| 1 TB | 1,000,000,000,000 | 1,099,511,627,776 | 9.95% | 931 GB, 953,674 MB | 1,000.00 GB |
The capacity of hard disk drives is given by manufacturers in
megabytes (1 MB = 1,000,000 bytes),
gigabytes (1 GB = 1,000,000,000 bytes) or
terabytes (1 TB = 1,000,000,000,000 bytes).
[18][19] This numbering convention, where prefixes like
kilo- and
mega- denote powers of 1000, is also used for data transmission rates and
DVD capacities. However, the convention is different from that used for
RAM,
ROM and
CD capacities, where prefixes like
kilo- and
mega- mean powers of 1024.
When the standard
unit prefixes like
kilo- denote
powers of two math in the measure of computer capacities, the 2
10n progression (for
n = 1, 2, …) is as follows:
[18]- kilo = 210 = 10241 = 1024,
- mega = 220 = 10242 = 1,048,576,
- giga = 230 = 10243 = 1,073,741,824,
- tera = 240 = 10244 = 1,099,511,627,776,
and so forth.
The practice of using suffixes assigned to every three
powers of 10 within the hard drive industry (storage) dates back to the early days of computing. Some computers like the
IBM 702, which in 1953 used
magnetic-core memory (non-volatile memory comprising small magnetic rings), had precisely 10,000 memory locations. Other computers however, such as the
IBM 704 (also with magnetic-core memory) in 1954 had up to 32,768 words of memory, which was referred to as “32k words.” Thus, the prefix “k” was being used to represent 1024 in the 1950s.
[20] The practice of using the prefix “K” to denote 1024 was further reinforced after magnetic-core memory was obsoleted by Intel Corporation in 1969 with the introduction of the
Intel 1102 dynamic random-access memory (DRAM) chip featuring 1024 bits of memory, Intel marketed it as a “1K” or 1 kilobit chip.
[21][22] When
supercomputers with large amounts of IC-based memory were developed, such as the
Cray‑1 in 1976, which featured up to 8 × 1024 × 1024 bytes of DRAM in 64-bit words, terminology such as “4M words” helped to popularize the use of the standard prefix “M” to denote the multiple 1,048,576 (1024
2). Today, computer memory in
DIMM form is commercially available in multiples of
gigabytes.
In the case of “mega-,” there is a nearly 5% difference between its decimal definition used by the HDD industry and its powers-of-two definition used for other computing purposes like memory. Furthermore, the difference is compounded by 2.4% with each incrementally larger prefix (gigabyte, terabyte, et cetera). The discrepancy between the two conventions for measuring capacity was the subject of two class action suits against HDD manufacturers. The plaintiffs argued that the use of decimal measurements effectively misled consumers (see
Orin Safier v. Western Digital Corporation[23] and
Cho v. Seagate Technology (US) Holdings, Inc.).
[24]Confusing the matter is different operating systems address this disparity in different ways. Microsoft Windows operating systems adhere to the binary convention when reporting files sizes; a file that the operating system reports as measuring precisely 4 megabytes comprises 4,194,304 bytes
(10242 × 4) and therefore occupies nearly 4.2 megabytes of hard disk capacity as the unit of measure is defined by the drive manufacturers. However, starting with the 2009 introduction of
OS X 10.6 (“
Snow Leopard”), Apple Inc. began using decimal math when reporting file size using the prefixes.
In December 1998, an international
standards organization attempted to address these dual definitions of the conventional prefixes by proposing unique
binary prefixes and prefix symbols to denote multiples of 1024, such as “
mebibyte (MiB)”, which exclusively denotes 2
20 or 1,048,576 bytes.
[25] In the over‑12 years that have since elapsed, the proposal has seen little adoption by the computer industry and the conventionally prefixed forms of “byte” continue to denote slightly different values depending on context.
[26][27][edit] Form factors

5¼″ full height 110 MB HDD,
2½″ (8.5 mm) 6495 MB HDD,
US/UK pennies for comparison.

A 2.5 inch
SATA hard drive from a Sony Vaio E series laptop.

Six hard drives with 8″, 5.25″, 3.5″, 2.5″, 1.8″, and 1″ disks, partially disassembled to show platters and read-write heads, with a ruler showing inches.
Mainframe and minicomputer hard disks were of widely varying dimensions, typically in free standing cabinets the size of washing machines (e.g.
HP 7935 and
DEC RP06 Disk Drives) or designed so that dimensions enabled placement in a
19" rack (e.g.
Diablo Model 31). In 1962,
IBM introduced its
model 1311 disk, which used 14 inch (nominal size) platters. This became a standard size for mainframe and minicomputer drives for many years,
[28] but such large platters were never used with microprocessor-based systems.
With increasing sales of microcomputers having built in
floppy-disk drives (FDDs), HDDs that would fit to the FDD mountings became desirable, and this led to the evolution of the market towards drives with certain
Form factors, initially derived from the sizes of 8-inch, 5.25-inch, and 3.5-inch floppy disk drives. Smaller sizes than 3.5 inches have emerged as popular in the marketplace and/or been decided by various industry groups.
- 8 inch: 9.5 in × 4.624 in × 14.25 in (241.3 mm × 117.5 mm × 362 mm)
In 1979, Shugart Associates' SA1000 was the first form factor compatible HDD, having the same dimensions and a compatible interface to the 8″ FDD.
- 5.25 inch: 5.75 in × 3.25 in × 8 in (146.1 mm × 82.55 mm × 203 mm)
This smaller form factor, first used in an HDD by Seagate in 1980,[29] was the same size as full-height 51⁄4-inch-diameter (130 mm) FDD, 3.25-inches high. This is twice as high as "half height"; i.e., 1.63 in (41.4 mm). Most desktop models of drives for optical 120 mm disks (DVD, CD) use the half height 5¼″ dimension, but it fell out of fashion for HDDs. The Quantum Bigfoot HDD was the last to use it in the late 1990s, with "low-profile" (≈25 mm) and "ultra-low-profile" (≈20 mm) high versions.
- 3.5 inch: 4 in × 1 in × 5.75 in (101.6 mm × 25.4 mm × 146 mm) = 376.77344 cm³
This smaller form factor, first used in an HDD by Rodime in 1983,[30] was the same size as the "half height" 3½″ FDD, i.e., 1.63 inches high. Today it has been largely superseded by 1-inch high "slimline" or "low-profile" versions of this form factor which is used by most desktop HDDs.
- 2.5 inch: 2.75 in × 0.275–0.59 in × 3.945 in (69.85 mm × 7–15 mm × 100 mm) = 48.895–104.775 cm3
This smaller form factor was introduced by PrairieTek in 1988;[31] there is no corresponding FDD. It is widely used today for hard-disk drives in mobile devices (laptops, music players, etc.) and as of 2008 replacing 3.5 inch enterprise-class drives.[32] It is also used in the Playstation 3[33] and Xbox 360[citation needed] video game consoles. Today, the dominant height of this form factor is 9.5 mm for laptop drives (usually having two platters inside), but higher capacity drives have a height of 12.5 mm (usually having three platters). Enterprise-class drives can have a height up to 15 mm.[34] Seagate has released a wafer-thin 7mm drive aimed at entry level laptops and high end netbooks in December 2009.[35]
- 1.8 inch: 54 mm × 8 mm × 71 mm = 30.672 cm³
This form factor, originally introduced by Integral Peripherals in 1993, has evolved into the ATA-7 LIF with dimensions as stated. It was increasingly used in digital audio players and subnotebooks, but is rarely used today. An original variant exists for 2–5GB sized HDDs that fit directly into a PC card expansion slot. These became popular for their use in iPods and other HDD based MP3 players.
- 1 inch: 42.8 mm × 5 mm × 36.4 mm
This form factor was introduced in 1999 as IBM's Microdrive to fit inside a CF Type II slot. Samsung calls the same form factor "1.3 inch" drive in its product literature.[36]
- 0.85 inch: 24 mm × 5 mm × 32 mm
Toshiba announced this form factor in January 2004[37] for use in mobile phones and similar applications, including SD/MMC slot compatible HDDs optimized for video storage on 4G handsets. Toshiba currently sells a 4 GB (MK4001MTD) and 8 GB (MK8003MTD) version [1][dead link] and holds the Guinness World Record for the smallest hard disk drive.[38]
3.5-inch and 2.5-inch hard disks currently dominate the market.
By 2009 all manufacturers had discontinued the development of new products for the 1.3-inch, 1-inch and 0.85-inch form factors due to falling prices of
flash memory,
[39][40] which is slightly more stable and resistant to damage from impact and/or dropping.
The inch-based nickname of all these form factors usually do not indicate any actual product dimension (which are specified in millimeters for more recent form factors), but just roughly indicate a size relative to disk diameters, in the interest of historic continuity.
[edit] Current hard disk form factors
| Form factor | Width | Height | Largest capacity | Platters (Max) |
| 3.5″ | 102 mm | 25.4 mm | 3 TB[41] (2010) | 5 |
| 2.5″ | 69.9 mm | 7–15 mm | 1.5 TB[42] (2010) | 4[43] |
| 1.8″ | 54 mm | 8 mm | 320 GB[44] (2009) | 3 |
[edit] Obsolete hard disk form factors
| Form factor | Width | Largest capacity | Platters (Max) |
| 5.25″ FH | 146 mm | 47 GB[45] (1998) | 14 |
| 5.25″ HH | 146 mm | 19.3 GB[46] (1998) | 4[47] |
| 1.3″ | 43 mm | 40 GB[48] (2007) | 1 |
| 1″ (CFII/ZIF/IDE-Flex) | 42 mm | 20 GB (2006) | 1 |
| 0.85″ | 24 mm | 8 GB[49] (2004) | 1 |
[edit] Performance characteristics
[edit] Access time
The factors that limit the time to access the data on a hard disk drive (
Access time) are mostly related to the mechanical nature of the rotating disks and moving heads.
Seek time is a measure of how long it takes the head assembly to travel to the track of the disk that contains data. Latency is
rotational delay incurred because the desired disk sector may not be directly under the head when data transfer is requested. These two delays are on the order of milliseconds each. The
bit rate or data transfer rate once the head is in the right position creates delay which is a function of the number of blocks transferred; typically relatively small, but can be quite long with the transfer of large contiguous files. Delay may also occur if the drive disks are stopped to save energy, see
Power management.
An HDD's
Average Access Time is its average
Seek time which technically is the time to do all possible seeks divided by the number of all possible seeks, but in practice is determined by statistical methods or simply approximated as the time of a seek over one-third of the number of tracks
[50]Defragmentation is a procedure used to minimize delay in retrieving data by moving related items to physically proximate areas on the disk.
[51] Some computer operating systems perform defragmentation automatically. Although automatic defragmentation is intended to reduce access delays, the procedure can slow response when performed while the computer is in use.
[52] Access time can be improved by increasing rotational speed, thus reducing latency and/or by decreasing seek time. Increasing areal density increases
throughput by increasing data rate and by increasing the amount of data under a set of heads, thereby potentially reducing seek activity for a given amount of data. Based on historic trends, analysts predict a future growth in HDD areal density (and therefore capacity) of about 40% per year.
[53] Access times have not kept up with throughput increases, which themselves have not kept up with growth in storage capacity.
[edit] Seek time
Average
seek time ranges from 3
ms[54] for high-end server drives, to 15 ms for mobile drives, with the most common mobile drives at about 12
ms[55] and the most common desktop type typically being around 9 ms. The
first HDD had an average seek time of about 600 ms and by the middle 1970s HDDs were available with seek times of about
25 ms. Some early PC drives used a
stepper motor to move the heads, and as a result had seek times as slow as 80–120 ms, but this was quickly improved by
voice coil type actuation in the 1980s, reducing seek times to around 20 ms. Seek time has continued to improve slowly over time.
[edit] Latency
Latency is the delay for the rotation of the disk to bring the required
disk sector under the read-write mechanism. It depends on rotational speed of a disk, measured in
revolutions per minute (RPM). Average rotational delay is shown in the table below, based on the empirical relation that the average latency in milliseconds for such a drive is one-half the rotational period:
-
-
-
-
-
| Spindle [rpm] | Average latency [ms] |
| 4200 | 7.14 |
| 5400 | 5.56 |
| 7200 | 4.17 |
| 10000 | 3 |
| 15000 | 2 |
href//center {width}80
[edit] Data transfer rate
As of 2010, a typical 7200 rpm desktop hard drive has a sustained "disk-to-
buffer" data transfer rate up to 1030 Mbits/sec.
[56] This rate depends on the track location, so it will be higher for data on the outer tracks (where there are more data sectors) and lower toward the inner tracks (where there are fewer data sectors); and is generally somewhat higher for 10,000 rpm drives. A current widely used standard for the "buffer-to-computer" interface is 3.0 Gbit/s SATA, which can send about 300 megabyte/s from the buffer to the computer, and thus is still comfortably ahead of today's disk-to-buffer transfer rates. Data transfer rate (read/write) can be measured by writing a large file to disk using special file generator tools, then reading back the file. Transfer rate can be influenced by
file system fragmentation and the layout of the files.
[51]HDD data transfer rate depends upon the rotational speed of the platters and the data recording density. Because heat and vibration limit rotational speed, advancing density becomes the main method to improve sequential transfer rates.
[citation needed] Areal density advances by increasing both the number of tracks across the disk and the number of sectors per track, the latter will increase the data transfer rate (for a given RPM). Since data transfer rate performance only tracks one of the two components of areal density, its performance improves at lower rate,
[edit] Power consumption
Power consumption has become increasingly important, not only in mobile devices such as laptops but also in server and desktop markets. Increasing data center machine density has led to problems delivering sufficient power to devices (especially for spin up), and getting rid of the waste heat subsequently produced, as well as environmental and electrical cost concerns (see
green computing). Heat dissipation directly tied to power consumption, and as drive age, disk
failure rates increase at higher drive temperatures.
[57] Similar issues exist for large companies with thousands of desktop PCs. Smaller form factor drives often use less power than larger drives. One interesting development in this area is actively controlling the seek speed so that the head arrives at its destination only just in time to read the sector, rather than arriving as quickly as possible and then having to wait for the sector to come around (i.e. the rotational latency).
[citation needed] Many of the hard drive companies are now producing Green Drives that require much less power and cooling. Many of these Green Drives spin slower (<5,400 rpm compared to 7,200, 10,000 or 15,000 rpm) and also generate less waste heat.
[citation needed] Power consumption can also be reduced by parking the drive heads when the disk is not in use reducing friction, adjusting spin speeds according to transfer rates, and disabling internal components when not in use.
[58] Also in systems where there might be multiple hard disk drives, there are various ways of controlling when the hard drives spin up since the highest current is drawn at that time.
- On SCSI hard disk drives, the SCSI controller can directly control spin up and spin down of the drives.
- On Parallel ATA (aka PATA) and Serial ATA (SATA) hard disk drives, some support power-up in standby or PUIS. The hard disk drive will not spin up until the controller or system BIOS issues a specific command to do so. This limits the power draw or consumption upon power on.
- Some SATA II hard disk drives support staggered spin-up, allowing the computer to spin up the drives in sequence to reduce load on the power supply when booting.[59]
[edit] Power management
Most hard disk drives today support some form of power management which uses a number of specific power modes that save energy by reducing performance. When implemented an HDD will change between a full power mode to one or more power saving modes as a function of drive usage. Recovery from the deepest mode, typically called Sleep, may take as long as several seconds.
[60][edit] Audible noise
Measured in
dBA, audible noise is significant for certain applications, such as
DVRs, digital audio recording and
quiet computers. Low noise disks typically use
fluid bearings, slower rotational speeds (usually 5,400 rpm) and reduce the seek speed under load (
AAM) to reduce audible clicks and crunching sounds. Drives in smaller form factors (e.g. 2.5 inch) are often quieter than larger drives.
[edit] Shock resistance
Shock resistance is especially important for mobile devices. Some laptops now include
active hard drive protection that parks the disk heads if the machine is dropped, hopefully before impact, to offer the greatest possible chance of survival in such an event. Maximum shock tolerance to date is 350
g for operating and 1000 g for non-operating.
[61][edit] Access and interfaces
For the
ST-506 interface, the data
encoding scheme as written to the disk surface was also important. The first ST-506 disks used
Modified Frequency Modulation (MFM) encoding, and transferred data at a rate of 5
megabits per second. Later controllers using 2,7
RLL (or just "RLL") encoding caused 50% more data to appear under the heads compared to one rotation of an MFM drive, increasing data storage and data transfer rate by 50%, to 7.5 megabits per second.
Many ST-506 interface disk drives were only specified by the manufacturer to run at the 1/3 lower MFM data transfer rate compared to RLL, while other drive models (usually more expensive versions of the same drive) were specified to run at the higher RLL data transfer rate. In some cases, a drive had sufficient margin to allow the MFM specified model to run at the denser/faster RLL data transfer rate (not recommended nor guaranteed by manufacturers). Also, any RLL-certified drive could run on any MFM controller, but with 1/3 less data capacity and as much as 1/3 less data transfer rate compared to its RLL specifications.
Enhanced Small Disk Interface (ESDI) also supported multiple data rates (ESDI disks always used 2,7 RLL, but at 10, 15 or 20 megabits per second), but this was usually negotiated automatically by the disk drive and controller; most of the time, however, 15 or 20 megabit ESDI disk drives were not downward compatible (i.e. a 15 or 20 megabit disk drive would not run on a 10 megabit controller). ESDI disk drives typically also had jumpers to set the number of sectors per track and (in some cases) sector size.
SCSI originally had just one signaling frequency of 5
MHz for a maximum data rate of 5
megabytes/second over 8 parallel conductors, but later this was increased dramatically. The SCSI bus speed had no bearing on the disk's internal speed because of buffering between the SCSI bus and the disk drive's internal data bus; however, many early disk drives had very small buffers, and thus had to be reformatted to a different interleave (just like ST-506 disks) when used on slow computers, such as early
Commodore Amiga,
IBM PC compatibles and
Apple Macintoshes.
ATA disks have typically had no problems with interleave or data rate, due to their controller design, but many early models were incompatible with each other and could not run with two devices on the same physical cable in a master/slave setup. This was mostly remedied by the mid-1990s, when ATA's specification was standardized and the details began to be cleaned up, but still causes problems occasionally (especially with CD-ROM and DVD-ROM disks, and when mixing
Ultra DMA and non-UDMA devices).
Serial ATA does away with master/slave setups entirely, placing each disk on its own channel (with its own set of I/O ports) instead.
FireWire/IEEE 1394 and USB(1.0/2.0) HDDs are external units containing generally ATA or SCSI disks with ports on the back allowing very simple and effective expansion and mobility. Most FireWire/IEEE 1394 models are able to
daisy-chain in order to continue adding peripherals without requiring additional ports on the computer itself. USB however, is a point to point network and does not allow for daisy-chaining. USB hubs are used to increase the number of available ports and are used for devices that do not require charging since the current supplied by hubs is typically lower than what's available from the built-in USB ports.
[edit] Disk interface families used in personal computers
Notable families of disk interfaces include:

Several Parallel ATA hard disk drives
- Historical bit serial interfaces connect a hard disk drive (HDD) to a hard disk controller (HDC) with two cables, one for control and one for data. (Each drive also has an additional cable for power, usually connecting it directly to the power supply unit). The HDC provided significant functions such as serial/parallel conversion, data separation, and track formatting, and required matching to the drive (after formatting) in order to assure reliability. Each control cable could serve two or more drives, while a dedicated (and smaller) data cable served each drive.
- ST506 used MFM (Modified Frequency Modulation) for the data encoding method.
- ST412 was available in either MFM or RLL (Run Length Limited) encoding variants.
- Enhanced Small Disk Interface (ESDI) was an industry standard interface similar to ST412 supporting higher data rates between the processor and the disk drive.
- Modern bit serial interfaces connect a hard disk drive to a host bus interface adapter (today typically integrated into the "south bridge") with one data/control cable. (As for historical bit serial interfaces above, each drive also has an additional power cable, usually direct to the power supply unit.)
- Fibre Channel (FC), is a successor to parallel SCSI interface on enterprise market. It is a serial protocol. In disk drives usually the Fibre Channel Arbitrated Loop (FC-AL) connection topology is used. FC has much broader usage than mere disk interfaces, and it is the cornerstone of storage area networks (SANs). Recently other protocols for this field, like iSCSI and ATA over Ethernet have been developed as well. Confusingly, drives usually use copper twisted-pair cables for Fibre Channel, not fibre optics. The latter are traditionally reserved for larger devices, such as servers or disk array controllers.
- Serial ATA (SATA). The SATA data cable has one data pair for differential transmission of data to the device, and one pair for differential receiving from the device, just like EIA-422. That requires that data be transmitted serially. Similar differential signaling system is used in RS485, LocalTalk, USB, Firewire, and differential SCSI.
- Serial Attached SCSI (SAS). The SAS is a new generation serial communication protocol for devices designed to allow for much higher speed data transfers and is compatible with SATA. SAS uses a mechanically identical data and power connector to standard 3.5-inch SATA1/SATA2 HDDs, and many server-oriented SAS RAID controllers are also capable of addressing SATA hard drives. SAS uses serial communication instead of the parallel method found in traditional SCSI devices but still uses SCSI commands.
- Word serial interfaces connect a hard disk drive to a host bus adapter (today typically integrated into the "south bridge") with one cable for combined data/control. (As for all bit serial interfaces above, each drive also has an additional power cable, usually direct to the power supply unit.) The earliest versions of these interfaces typically had a 8 bit parallel data transfer to/from the drive, but 16-bit versions became much more common, and there are 32 bit versions. Modern variants have serial data transfer. The word nature of data transfer makes the design of a host bus adapter significantly simpler than that of the precursor HDD controller.
- Integrated Drive Electronics (IDE), later renamed to ATA, with the alias P-ATA ("parallel ATA") retroactively added upon introduction of the new variant Serial ATA. The original name reflected the innovative integration of HDD controller with HDD itself, which was not found in earlier disks. Moving the HDD controller from the interface card to the disk drive helped to standardize interfaces, and to reduce the cost and complexity. The 40-pin IDE/ATA connection transfers 16 bits of data at a time on the data cable. The data cable was originally 40-conductor, but later higher speed requirements for data transfer to and from the hard drive led to an "ultra DMA" mode, known as UDMA. Progressively swifter versions of this standard ultimately added the requirement for a 80-conductor variant of the same cable, where half of the conductors provides grounding necessary for enhanced high-speed signal quality by reducing cross talk. The interface for 80-conductor only has 39 pins, the missing pin acting as a key to prevent incorrect insertion of the connector to an incompatible socket, a common cause of disk and controller damage.
- EIDE was an unofficial update (by Western Digital) to the original IDE standard, with the key improvement being the use of direct memory access (DMA) to transfer data between the disk and the computer without the involvement of the CPU, an improvement later adopted by the official ATA standards. By directly transferring data between memory and disk, DMA eliminates the need for the CPU to copy byte per byte, therefore allowing it to process other tasks while the data transfer occurs.
- Small Computer System Interface (SCSI), originally named SASI for Shugart Associates System Interface, was an early competitor of ESDI. SCSI disks were standard on servers, workstations, Commodore Amiga, and Apple Macintosh computers through the mid-1990s, by which time most models had been transitioned to IDE (and later, SATA) family disks. Only in 2005 did the capacity of SCSI disks fall behind IDE disk technology, though the highest-performance disks are still available in SCSI and Fibre Channel only. The range limitations of the data cable allows for external SCSI devices. Originally SCSI data cables used single ended (common mode) data transmission, but server class SCSI could use differential transmission, either low voltage differential (LVD) or high voltage differential (HVD). ("Low" and "High" voltages for differential SCSI are relative to SCSI standards and do not meet the meaning of low voltage and high voltage as used in general electrical engineering contexts, as apply e.g. to statutory electrical codes; both LVD and HVD use low voltage signals (3.3 V and 5 V respectively) in general terminology.)
| Acronym or abbreviation | Meaning | Description |
| SASI | Shugart Associates System Interface | Historical predecessor to SCSI. |
| SCSI | Small Computer System Interface | Bus oriented that handles concurrent operations. |
| SAS | Serial Attached SCSI | Improvement of SCSI, uses serial communication instead of parallel. |
| ST-506 | Seagate Technology | Historical Seagate interface. |
| ST-412 | Seagate Technology | Historical Seagate interface (minor improvement over ST-506). |
| ESDI | Enhanced Small Disk Interface | Historical; backwards compatible with ST-412/506, but faster and more integrated. |
| ATA (PATA) | Advanced Technology Attachment | Successor to ST-412/506/ESDI by integrating the disk controller completely onto the device. Incapable of concurrent operations. |
| SATA | Serial ATA | Modification of ATA, uses serial communication instead of parallel. |
[edit] Integrity

An IBM HDD head resting on a disk platter. Since the drive is not in operation, the head is simply pressed against the disk by the suspension.

Close-up of a hard disk head resting on a disk platter. A reflection of the head and its suspension is visible on the mirror-like disk.
Due to the extremely close spacing between the heads and the disk surface, hard disk drives are vulnerable to being damaged by a
head crash—a
failure of the disk in which the head scrapes across the platter surface, often grinding away the thin magnetic film and causing data loss. Head crashes can be caused by electronic failure, a sudden power failure, physical shock, contamination of the drive's internal enclosure, wear and tear,
corrosion, or poorly manufactured platters and heads.
The HDD's spindle system relies on air pressure inside the
disk enclosure to support the heads at their proper
flying height while the disk rotates. Hard disk drives require a certain range of air pressures in order to operate properly. The connection to the external environment and pressure occurs through a small hole in the enclosure (about 0.5 mm in breadth), usually with a filter on the inside (the
breather filter).
[63] If the air pressure is too low, then there is not enough lift for the flying head, so the head gets too close to the disk, and there is a risk of head crashes and data loss. Specially manufactured sealed and pressurized disks are needed for reliable high-altitude operation, above about 3,000 m (10,000 feet).
[64] Modern disks include temperature sensors and adjust their operation to the operating environment. Breather holes can be seen on all disk drives—they usually have a sticker next to them, warning the user not to cover the holes. The air inside the operating drive is constantly moving too, being swept in motion by friction with the spinning platters. This air passes through an internal recirculation (or "recirc") filter to remove any leftover contaminants from manufacture, any particles or chemicals that may have somehow entered the enclosure, and any particles or outgassing generated internally in normal operation. Very high humidity for extended periods can corrode the heads and platters.
For
giant magnetoresistive (GMR) heads in particular, a minor head crash from contamination (that does not remove the magnetic surface of the disk) still results in the head temporarily overheating, due to friction with the disk surface, and can render the data unreadable for a short period until the head temperature stabilizes (so called "thermal asperity", a problem which can partially be dealt with by proper electronic filtering of the read signal).
[edit] Actuation of moving arm

Head stack with actuator coil on the left side (partly hidden by the controller interface) and read/write heads on the right side
The hard drive's electronics control the movement of the actuator and the rotation of the disk, and perform reads and writes on demand from the
disk controller. Feedback of the drive electronics is accomplished by means of special segments of the disk dedicated to servo feedback. These are either complete concentric circles (in the case of dedicated servo technology), or segments interspersed with real data (in the case of embedded servo technology). The servo feedback optimizes the signal to noise ratio of the GMR sensors by adjusting the voice-coil of the actuated arm. The spinning of the disk also uses a servo motor. Modern disk firmware is capable of scheduling reads and writes efficiently on the platter surfaces and remapping sectors of the media which have failed.
[edit] Landing zones and load/unload technology

A read/write head from a circa-1998 Fujitsu 3.5-inch hard disk. The area pictured is approximately 2.0 mm x 3.0mm.

Microphotograph of an older generation hard disk head and slider (1990s). The size of the front face (which is the "trailing face" of the slider) is about 0.3 mm × 1.0 mm. It is the location of the actual head (magnetic sensors). The non-visible bottom face of the slider is about 1.0 mm × 1.25 mm (so-called "nano" size) and faces the platter. It contains the lithographically micro-machined air bearing surface (ABS) that allows the slider to fly in a highly controlled fashion. One functional part of the head is the round, orange structure visible in the middle—the
lithographically defined copper coil of the write
transducer. Also note the electric connections by wires bonded to gold-plated pads.
Modern HDDs prevent power interruptions or other malfunctions from landing its heads in the data zone by parking the heads either in a landing zone or by unloading (i.e., load/unload) the heads. Some early PC HDDs did not park the heads automatically and they would land on data. In some other early units the user manually parked the heads by running a program to park the HDD's heads.
A
landing zone is an area of the platter usually near its inner diameter (ID), where no data are stored. This area is called the Contact Start/Stop (CSS) zone. Disks are designed such that either a
spring or, more recently, rotational
inertia in the platters is used to park the heads in the case of unexpected power loss. In this case, the
spindle motor temporarily acts as a
generator, providing power to the actuator.
Spring tension from the head mounting constantly pushes the heads towards the platter. While the disk is spinning, the heads are supported by an air bearing and experience no physical contact or wear. In CSS drives the sliders carrying the head sensors (often also just called
heads) are designed to survive a number of landings and takeoffs from the media surface, though wear and tear on these microscopic components eventually takes its toll. Most manufacturers design the sliders to survive 50,000 contact cycles before the chance of damage on startup rises above 50%. However, the decay rate is not linear: when a disk is younger and has had fewer start-stop cycles, it has a better chance of surviving the next startup than an older, higher-mileage disk (as the head literally drags along the disk's surface until the air bearing is established). For example, the Seagate Barracuda 7200.10 series of desktop hard disks are rated to 50,000 start-stop cycles, in other words no failures attributed to the head-platter interface were seen before at least 50,000 start-stop cycles during testing.
[65]Around 1995 IBM pioneered a technology where a landing zone on the disk is made by a precision laser process (
Laser Zone Texture = LZT) producing an array of smooth nanometer-scale "bumps" in a landing zone,
[66] thus vastly improving
stiction and wear performance. This technology is still largely in use today (2008), predominantly in desktop and enterprise (3.5 inch) drives. In general, CSS technology can be prone to increased stiction (the tendency for the heads to stick to the platter surface), e.g. as a consequence of increased humidity. Excessive stiction can cause physical damage to the platter and slider or spindle motor.
Load/Unload technology relies on the heads being lifted off the platters into a safe location, thus eliminating the risks of wear and stiction altogether. The first HDD
RAMAC and most early disk drives used complex mechanisms to load and unload the heads. Modern HDDs use ramp loading, first introduced by
Memorex in 1967,
[67] to load/unload onto plastic "ramps" near the outer disk edge.
All HDDs today still use one of these two technologies listed above. Each has a list of advantages and drawbacks in terms of loss of storage area on the disk, relative difficulty of mechanical tolerance control, non-operating shock robustness, cost of implementation, etc.
Addressing shock robustness,
IBM also created a technology for their
ThinkPad line of laptop computers called the Active Protection System. When a sudden, sharp movement is detected by the built-in
accelerometer in the Thinkpad, internal hard disk heads automatically unload themselves to reduce the risk of any potential data loss or scratch defects.
Apple later also utilized this technology in their
PowerBook,
iBook,
MacBook Pro, and
MacBook line, known as the
Sudden Motion Sensor.
Sony,
[68] HP with their
HP 3D DriveGuard[69] and
Toshiba[70] have released similar technology in their notebook computers.
This accelerometer-based shock sensor has also been used for building cheap
earthquake sensor networks.
[71][edit] Disk failures and their metrics
Most major hard disk and motherboard vendors now support
S.M.A.R.T. (Self-Monitoring, Analysis, and Reporting Technology), which measures drive characteristics such as
operating temperature, spin-up time, data error rates, etc. Certain trends and sudden changes in these parameters are thought to be associated with increased likelihood of drive failure and data loss.
However, not all failures are predictable. Normal use eventually can lead to a breakdown in the inherently fragile device, which makes it essential for the user to periodically back up the data onto a separate storage device. Failure to do so can lead to the loss of data. While it may sometimes be possible to recover lost information, it is normally an extremely costly procedure, and it is not possible to guarantee success. A 2007 study published by
Google suggested very little correlation between failure rates and either high temperature or activity level; however, the correlation between manufacturer/model and failure rate was relatively strong. Statistics in this matter is kept highly secret by most entities. Google did not publish the manufacturer's names along with their respective failure rates,
[72] though they have since revealed that they use Hitachi Deskstar drives in some of their servers.
[73] While several S.M.A.R.T. parameters have an impact on failure probability, a large fraction of failed drives do not produce predictive S.M.A.R.T. parameters.
[72] S.M.A.R.T. parameters alone may not be useful for predicting individual drive failures.
[72]A common misconception is that a colder hard drive will last longer than a hotter hard drive. The Google study seems to imply the reverse—"lower temperatures are associated with higher failure rates". Hard drives with S.M.A.R.T.-reported average temperatures below 27 °C (80.6 °F) had higher failure rates than hard drives with the highest reported average temperature of 50 °C (122 °F), failure rates at least twice as high as the optimum S.M.A.R.T.-reported temperature range of 36 °C (96.8 °F) to 47 °C (116.6 °F).
[72]SCSI,
SAS, and
FC drives are typically more expensive and are traditionally used in
servers and
disk arrays, whereas inexpensive ATA and SATA drives evolved in the
home computer market and were perceived to be less reliable. This distinction is now becoming blurred.
The
mean time between failures (MTBF) of SATA drives is usually about 600,000 hours (some drives such as
Western Digital Raptor have rated 1.4 million hours MTBF),
[74] while SCSI drives are rated for upwards of 1.5 million hours.
[citation needed] However, independent research indicates that MTBF is not a reliable estimate of a drive's longevity.
[75] MTBF is conducted in laboratory environments in test chambers and is an important metric to determine the quality of a disk drive before it enters high volume production. Once the drive product is in production, the more valid metric is
annualized failure rate (AFR).
[citation needed] AFR is the percentage of real-world drive failures after shipping.
SAS drives are comparable to SCSI drives, with high MTBF and high reliability.
[citation needed]Enterprise S-ATA drives designed and produced for enterprise markets, unlike standard S-ATA drives, have reliability comparable to other enterprise class drives.
[76][77]Typically enterprise drives (all enterprise drives, including SCSI, SAS, enterprise SATA, and FC) experience between 0.70%–0.78% annual failure rates from the total installed drives.
[citation needed]Eventually all mechanical hard disk drives fail, so to mitigate loss of data, some form of redundancy is needed, such as
RAID[78] or a regular
backup[78] system.
[edit] External removable drives
External removable hard disk drives connect to the computer using a USB cable or other means. External drives are used for:

A 6 GB Seagate Pocket hard drive with USB cable extended next to a 2 GB
CompactFlash card.
Larger models often include full-sized 3.5" PATA or SATA desktop hard drives. Features such as biometric security or multiple interfaces generally increase cost.
[edit] Market segments
- As of July 2010, the highest capacity consumer HDDs are 3 TB.[79]
- "Desktop HDDs" typically store between 120 GB and 2 TB and rotate at 5,400 to 10,000 rpm, and have a media transfer rate of 0.5 Gbit/s or higher. (1 GB = 109 bytes; 1 Gbit/s = 109 bit/s)
- Enterprise HDDs are typically used with multiple-user computers running enterprise software. Examples are
- transaction processing databases;
- internet infrastructure (email, webserver, e-commerce);
- scientific computing software;
- nearline storage management software.
- The fastest enterprise HDDs spin at 10,000 or 15,000 rpm, and can achieve sequential media transfer speeds above 1.6 Gbit/s.[80] and a sustained transfer rate up to 1 Gbit/s.[80] Drives running at 10,000 or 15,000 rpm use smaller platters to mitigate increased power requirements (as they have less air drag) and therefore generally have lower capacity than the highest capacity desktop drives.
- Enterprise drives commonly operate continuously ("24/7") in demanding environments while delivering the highest possible performance without sacrificing reliability. Maximum capacity is not the primary goal, and as a result the drives are often offered in capacities that are relatively low in relation to their cost.[81]
- Mobile HDDs or laptop HDDs, smaller than their desktop and enterprise counterparts, tend to be slower and have lower capacity. A typical mobile HDD spins at either 4200 rpm, 5200 rpm, 5400 rpm, or 7200 rpm, with 5400 rpm being the most prominent. 7200 rpm drives tend to be more expensive and have smaller capacities, while 4200 rpm models usually have very high storage capacities. Because of smaller platter(s), mobile HDDs generally have lower capacity than their greater desktop counterparts.
Worldwide revenue from shipments of HDDs is expected to reach $27.7 billion in 2010, up 18.4% from $23.4 billion in 2009
[83] corresponding to a 2010 unit shipment forecast of 674.6 million compared to 549.5 million units in 2009.
[84]Hard drives are traditionally symbolized as either a stylized stack of platters (in
orthographic projection) or, more abstractly, as a cylinder. This is particularly found in
schematic diagrams or on indicator lights, as on laptops, to indicate hard drive access. In most modern operating systems, hard drives are instead represented by an illustration or photograph of a hard drive enclosure. These are illustrated below.
-
Today, hard drives are symbolized by a picture of the enclosure.
-
Schematically, hard drives may be represented by cylinders or stacks of platters, as in this
RAID diagram.
-
The cylinder schematic derives from hard drives internally being a stack of platters, as in these 1970s vintage disk pack (cover removed).
[edit] Manufacturers
More than 200 companies have manufactured hard disk drives. Today most drives are made by
Seagate,
Western Digital,
Samsung, and
Toshiba (though Toshiba does not manufacture 3.5 inch drives).
http://en.wikipedia.org/wiki/External_hard_disk
1 Tanggapan untuk "Hard Disk Drive (HDD)"
Really this post is Great! I like it. i didn't know about hard drive but after study this post i learnt many things.
steel enclosures
Post a Comment